佐々木研究室では,「人にやさしいロボットの実現」を目的に研究を行っています.人間の筋肉のように動作する空気圧ゴム人工筋などの空気圧ソフトアクチュエータを使った様々なパワーアシストロボットやパワーアシストロボットのための要素技術をこれまでに開発しています.また,開発したパワーアシストロボットの福祉・介護分野など社会的要望の高い分野への応用に積極的に取り組んでいます.
最新の研究内容を掲載したリーフレットはこちらからダウンロードできます.
高校生向け研究案内はこちら
研究室の様子はこちらでも見ることができます.(youtube)
研究分野に関連する職種の内容に関して大学生・高校生向けに学会誌の特集を企画しました.こちら(外部リンク)で見ることができます.大学生の皆さんは研究室や就職先選びの,高校生の皆さんには少し難しいかもしれませんが進路選択の参考にしてください.
外骨格型ウェアラブルパワーアシストロボットは,高出力のアクチュエータを実装できるので,たとえば麻痺患者や高齢者など,使用者の発生力が小さくロボットに高アシスト力が求められる場面での利用に適しています.しかし,高い性能を実現している反面,外骨格型は大がかりな機構を常時装着することになるため,長時間の装着が負担になるという実用面での課題もあります.そこで,佐々木研究室では外骨格型の問題点であった使用の容易さに着目し,健常者が使用する衣服と同程度の着用性をもつ"パワーアシストウェア"の開発にこれまで取り組んでいます.
開発したパワーアシストウェアの駆動には,湾曲,伸長,膨張など各種の動作を行う空気圧ゴム人工筋などの空気圧ソフトアクチュエータを使用しています.これらのアクチュエータは,ゴムなどの柔軟な材料を布や繊維により変形を拘束することで所望の動作を実現しています.
作業者の動作支援や脳梗塞患者のリハビリテーション支援などへのパワーアシストウェアの応用にも取り組んでいます.


開発したパワーアシストグローブは,手指背面に配置した伸長型湾曲空気圧ゴム人工筋により手指の屈曲動作の補助が可能です.人工筋の加圧パターンを変えることで,物体を握る動作や物体のつまみ動作を行うことが可能です.このパワーアシストグローブは,握力の低下した高齢者や麻痺のある障害者に加え,工場作業者の負担軽減などへの応用が期待できます.
このパワーアシストグローブを実現する上で最も重要な要素技術は,それ自体が湾曲動作を生成する空気圧ゴム人工筋です.本グローブは人工筋自体が湾曲動作を行うため外骨格を使用せず,使用者の骨格を利用した内骨格型と呼ぶことのできる,他事例と異なる特徴を持つパワーアシストロボットを実現しました.



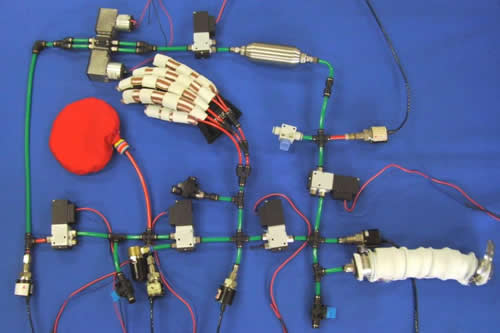
パワーアシストロボットを動作させるためには,アクチュエータやエネルギー源などの周辺要素技術の開発も重要な課題です.佐々木研究室では,これら要素技術の開発にも取り組んでいます.
従来型ゴム人工筋としては,人間の筋肉のように圧縮空気を供給すると収縮するMcKibben(マッキベン)型空気圧ゴム人工筋が有名です.他大学でもこの人工筋を使用したパワーアシストロボットが多く開発されており,本研究室でもMcKibben型空気圧ゴム人工筋を使用したパワーアシストウェアの開発に取り組んでいます.
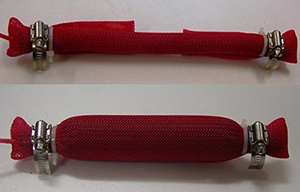
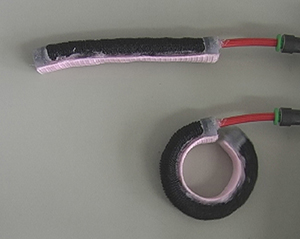
湾曲,伸長,膨張などアクチュエータそのものが形状を変えることができれば,簡便な構造のパワーアシストロボットを実現できるため,様々な動作が可能な空気圧ソフトアクチュエータの開発に取り組んでいます.
空気圧アクチュエータを駆動するには,圧縮空気を生成する空気圧供給システムが必要不可欠です.パワーアシストロボットへ空気圧供給システムを装着するには,システムの小型,軽量化が重要な課題です.本研究では,アクチュエータから排気する空気を回収,再圧縮する回生機能を持つ小型の供給システムの研究を行っています.